
Apitor Robot Xを使ったロボット作成に慣れるために、まずはバイクを作ってみた。
構成
- ハンドルの操作:低速モーター (M3)
- 後輪の駆動__:高速モーター (M1)
プログラム
- 単純に八の字を描く動作。
- LEDはターン時と停止時の指示器として使用。
- 2021/06/13 : The better way to flashing LED is as follows.
- Example : every 1 second(s), led L1 color orange last 1 second(s)
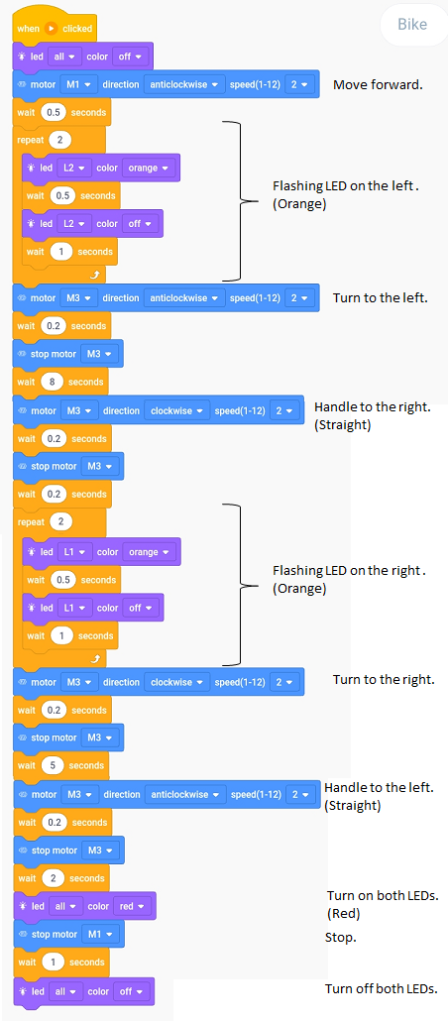
Apitor Robot X : Bike (Program) 
Apitor Robot X : Bike (Right side) 
Apitor Robot X : Bike (Right front) 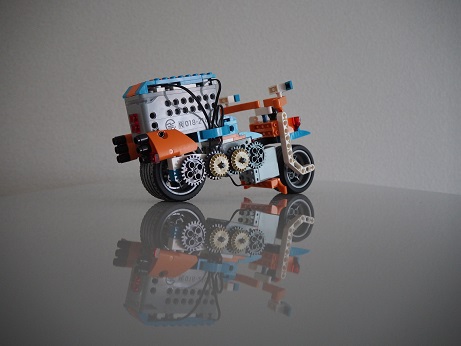
Apitor Robot X : Bike (Right rear) 
Apitor Robot X : Bike (rear) 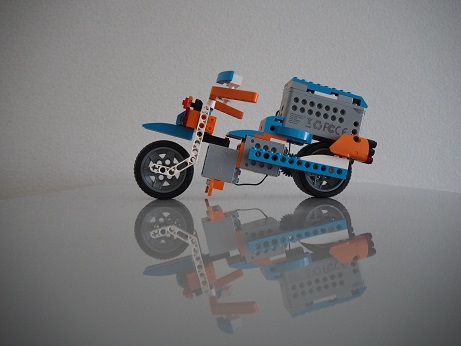
Apitor Robot X : Bike (Left side)
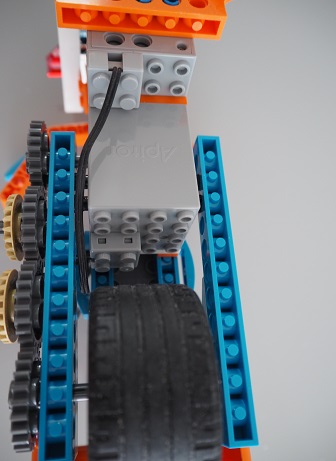
Apitor Robot X : Bike (Motor connection: Motor) 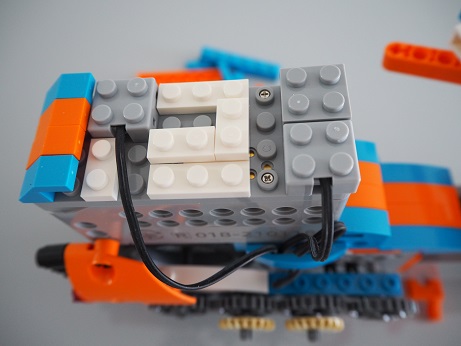
Apitor Robot X : Bike (Motor connection: Controller) 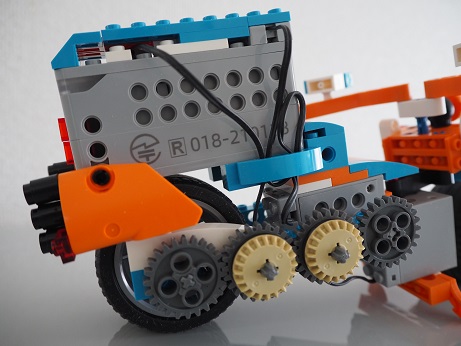
Apitor Robot X : Bike (Drive part) 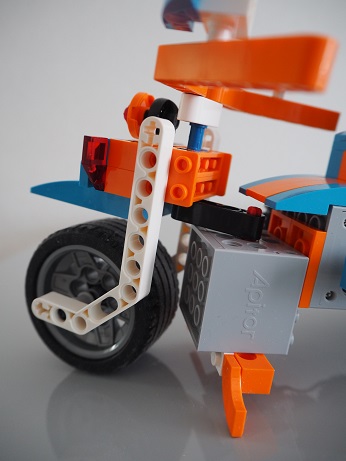
Apitor Robot X : Bike (Steering) 
Apitor Robot X : Bike (Full view: Upper) 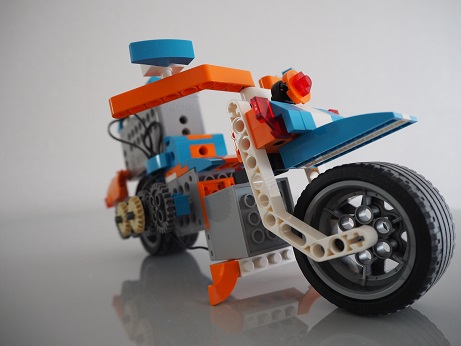
Apitor Robot X : Bike (Full view: Lower)
実際の動作
You Tube https://youtu.be/qVaVuv5nSGM
使った感想
- テクニカル系のパーツの種類が少ないので、組み立てには初代機とは違った難しさがあった。
- モーターが本体から分離されたので、モーターの向きや配置を自由にできる。
- モーターのトルクが強くなっているので、小刻みな回転が容易になったし、力強い動きのロボットを作ることができる。
- 時々、モーターが反応しなくなることがあった。こういう時は、コネクタのブロックを押さえたり、本体の電源を再投入するなどして復活した。
- センサーは特に気になる点はなかった。(単体で動作を確認)
- プログラミングブロックの種類が増えてるかも。(詳細は未確認)
