
久しぶりにApitorを出してきて、腕立て伏せロボットを作った。

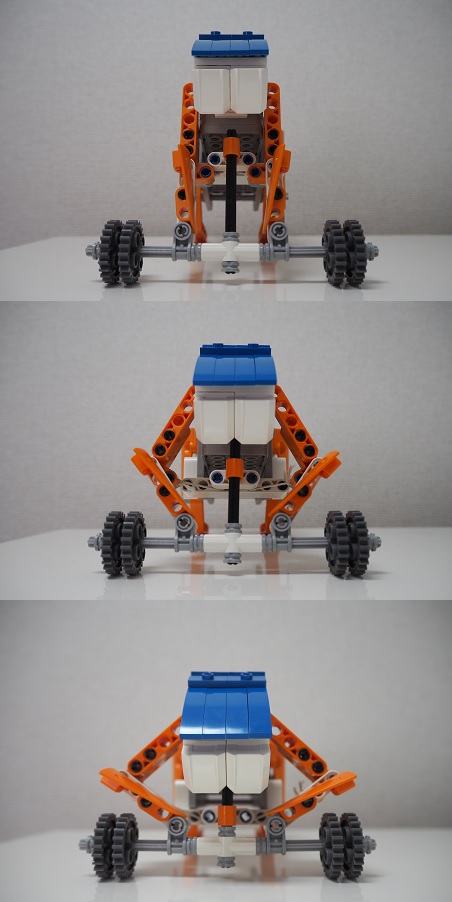

構成
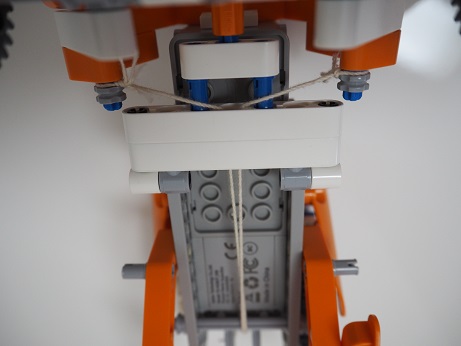
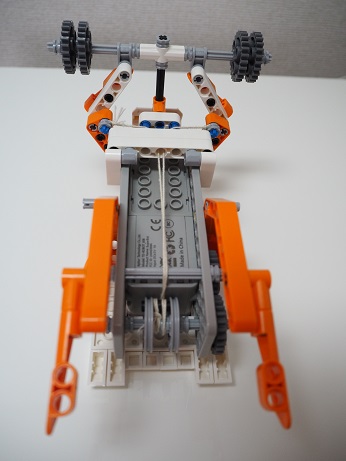
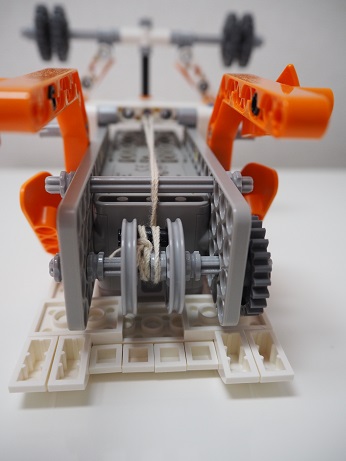
肘の部分に紐を付けて、この紐を巻いたり緩めたりすることで、肘を屈伸させる。
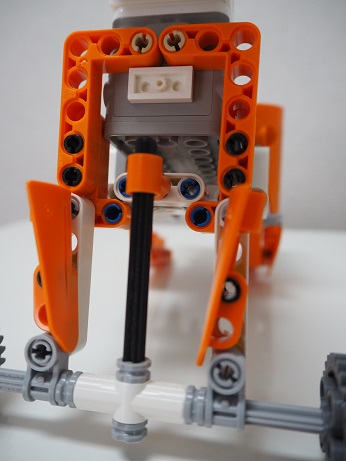
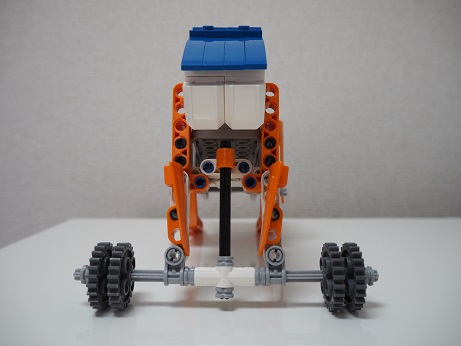
肘を屈伸させると重心がずれるので、対策として首元から下に軸を装着。


プログラム
モーターを時計回りと反時計回りに回転させるだけの簡単なプログラム。

Apitor push-ups robot (Program)
実際の動作
You Tube https://youtu.be/RXzGf1YX_OU
久しぶりにApitorを出してきて、腕立て伏せロボットを作った。
構成
肘の部分に紐を付けて、この紐を巻いたり緩めたりすることで、肘を屈伸させる。
肘を屈伸させると重心がずれるので、対策として首元から下に軸を装着。
プログラム
モーターを時計回りと反時計回りに回転させるだけの簡単なプログラム。
実際の動作
You Tube https://youtu.be/RXzGf1YX_OU

これは面白いよ!
いいねいいね
ありがとうー^^
いいねいいね